今天刷社媒的时候,发现印度空间组织ISRO发布了一条新消息,月船3号月球探测器经过一个月的复杂飞行与机动,目前已经处在月球150×177公里的准圆轨道上。下一次也是最后一次组合体变轨机动将在2天后的8月16日进行,届时月船3号可能将处于100公里左右的月球圆轨道上,进行着陆月球前的最后准备。这个过程像极了4年前月船2号的登月之旅,而印度人这次能否能在月船2号做减法的基础上完成月球着陆,亦或是它与俄国Luna-25月球着陆器谁能更加成功,似乎成了更吸引人们眼球的看点。而我想跟大家分享的,是探讨月船3号是如何在月船2号的基础上做减法的,以及是否能避免重蹈4年前的覆辙。
没有公开资料显示月船3号使用的推进器、探测器和月球车是否为当年月船2号的备份,但从整个项目总共耗资不足1亿美元来看(包含发射费用),大概率是复用了当年的备份。另外一个佐证是,尽管月船三号省略了轨道器模块(因为月船2号的轨道器还在月球轨道上正常运行着),整个组合体的外观与月船2号高度一致。所以,月船3号从功能上讲只有一个推进器和一个着陆器(月球车藏在着陆器中),由于抛弃了绕月飞行的轨道器概念,附加在轨道器上的8个科学仪器(重约30公斤)也被做了减法。
还有一个比较奇怪的减法是,月船3号的维克拉姆着陆器的800N节流主发动机从5台变成了4台。实际上月船2号上最初设计的也是4台主发动机,最后增加的中间第5台发动机只起到补偿作用,当时给出的理由是着陆器在着陆前要在轨飞行一段时间。现在看来这个理由是有些牵强的,因为月船3号着陆器在着陆前还是要绕轨飞行的。不排除当年增加的这第5台主发动机,在某些极端情况下打乱了飞控软件的控制逻辑,一定程度上导致了月船2号的坠毁。因为当年最终的调查报告显示,月船2号失联前水平速度和垂直速度都超过了50m/s,作为软件大国的印度理应不会考虑不到这些极端情况,一种合理的猜测就是与临时增加的硬件匹配不足。
在整体做减法的同时,月船3号也在着陆器上加强了一些东西。比如对比月船2号的着陆腿,月船3号的四条腿更加粗壮,能够承受更大的着陆冲击力;重新匹配的姿控发动机将姿态修正能力整整提高了一倍,从10°/秒提高到了20°/秒;另外还增加了LDV激光多普勒测量仪,可以实时给出着陆器的三维姿态;另外飞控软件和紧急控制系统也得到了加强,以应对着陆时可能出现的意外。
如果月船3号着陆成功,那么印度将终于完成4年前就该实现的着陆月球计划。尽管这只是一次成补不足一亿美金的低成本项目,与4年前的任务几乎毫无区别,但这是印度和ISRO迫切需要的。这不仅将让他们坐稳探月老四的位置,而且也急于向日本JAXA证明自己完全有能力执行2024年两国合作的“月球极地探测计划”,因为在这个计划中印度同样扮演着提供月球着陆器的角色。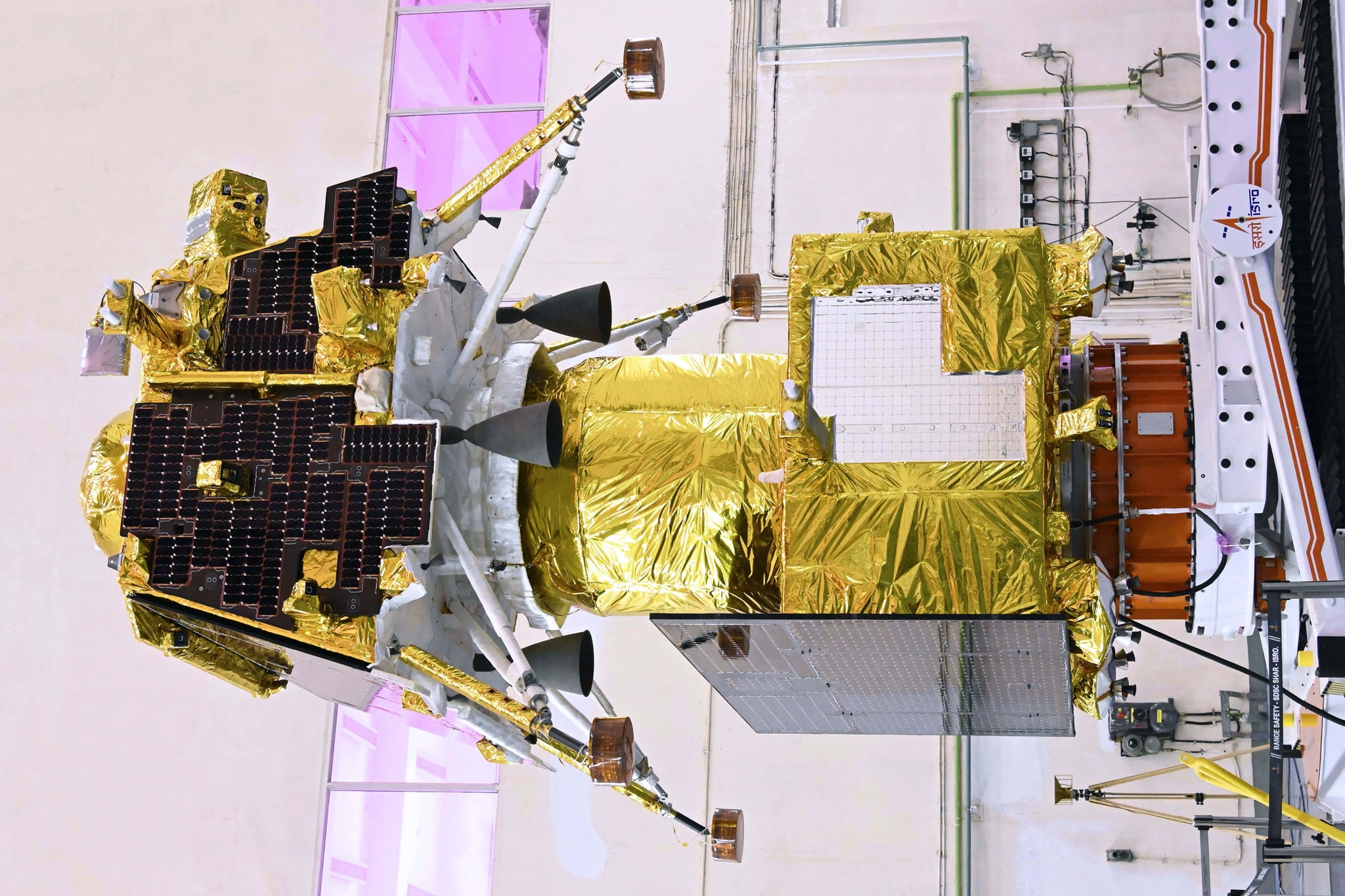
比较有意思的是,4年前的月船2号任务期间,美国宇航局NASA曾整个鞍前马后,不但其深空网DSN参与了整个项目的测控,而且还在着陆器上搭载了NASA的激光测距仪,甚至月船2号坠毁后NASA的DSN也投入了大量的资源进行寻找。不过这次月船3号任务却找不到NASA的影子,连深空测控也是由欧空局ESA提供的,这一点确实有些意思。
月船3号将在8月23日着陆月球,那这次会不会成功呢?我的判断是会成功,而且也必须成功。一方面ISRO确实补足了之前软件问题的短板(甚至修改了部分硬件),另一方面他们也没有输的时间了,俄国的“Luna-25”很可能会抢先“月船3号”2天成功着陆,他们还更不想失去日本这个优质的合作伙伴。





